Mass Moments of Inertia
Two Dimensional Shapes
Three Dimensional Shapes
Two dimensional shapes
Rectangular plate
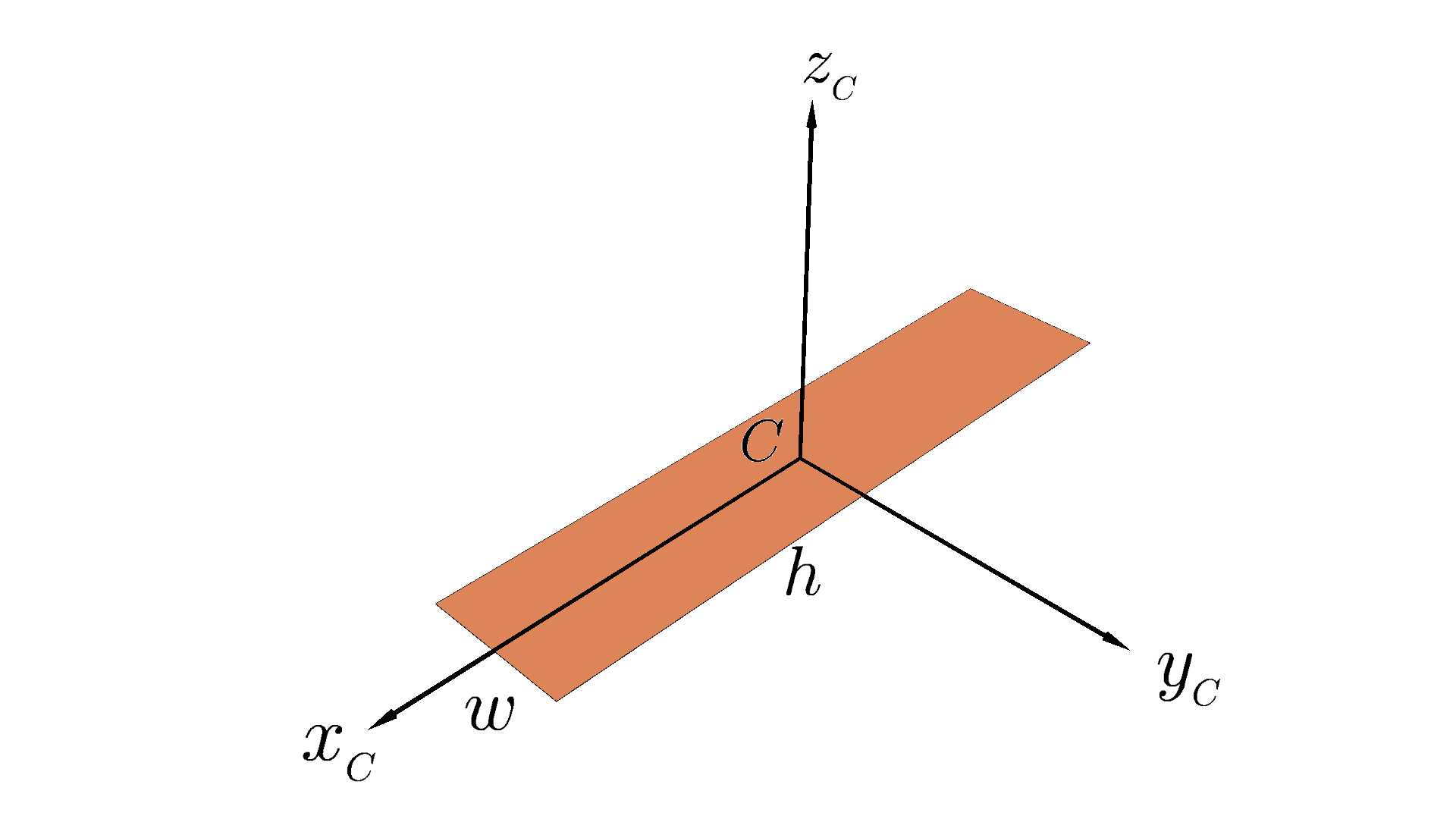
The mass moment of inertia tensor is:
\mathbf{I} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\ I_{xz} & I_{yz} & I_{zz} \end{bmatrix} = \frac{m}{12}\begin{bmatrix} w^2 & 0 & 0 \\ 0 & h^2 & 0 \\ 0 & 0 & w^2 + h^2 \end{bmatrix}
It is the same as the cuboid here, setting d = 0.
Circular plate
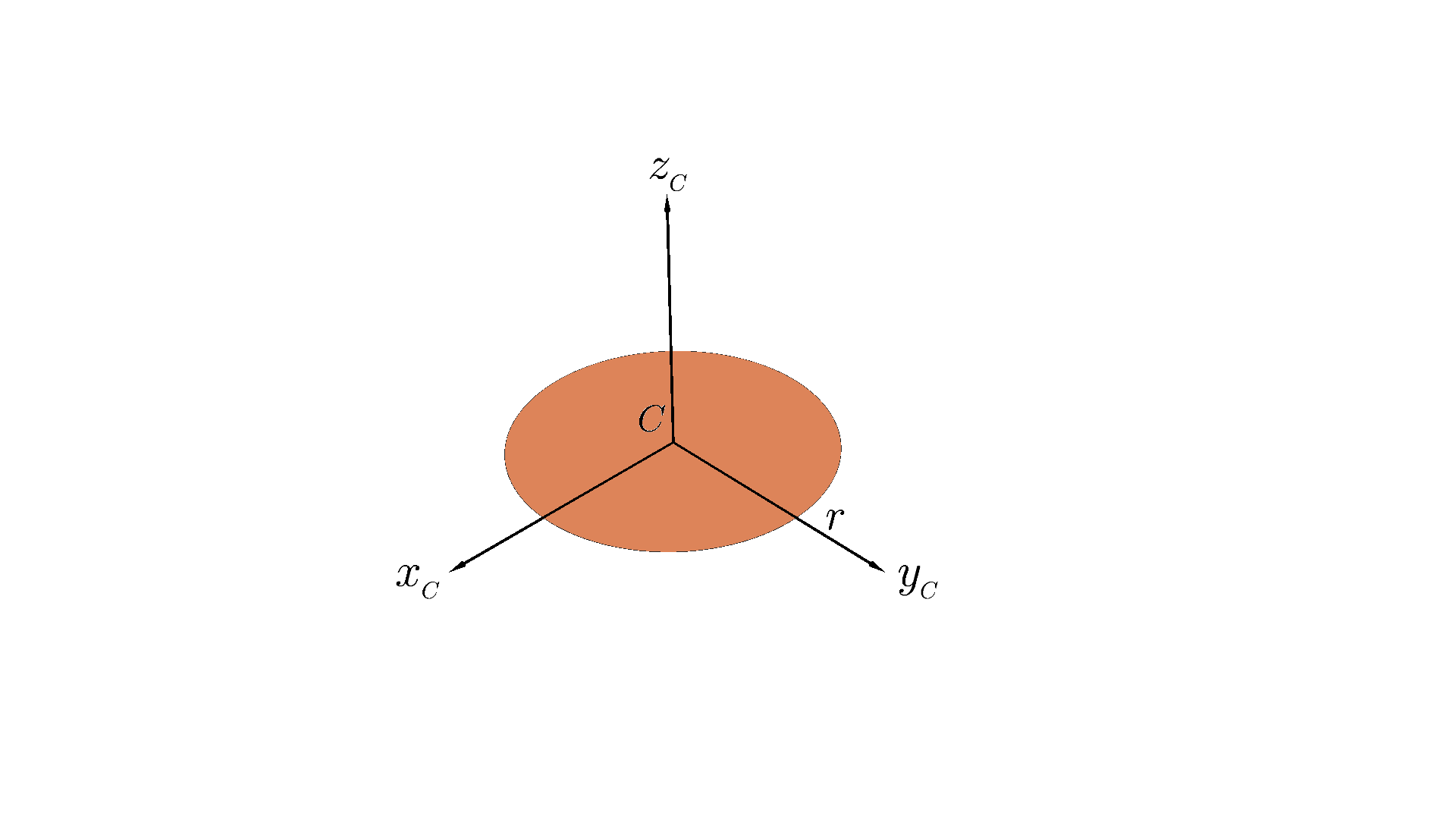
The mass moment of inertia tensor is:
\mathbf{I} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\ I_{xz} & I_{yz} & I_{zz} \end{bmatrix} = \frac{1}{4}m r^2 \begin{bmatrix}1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 2 \end{bmatrix}
It is the same as the cylinder here, setting h = 0.
Triangular plate
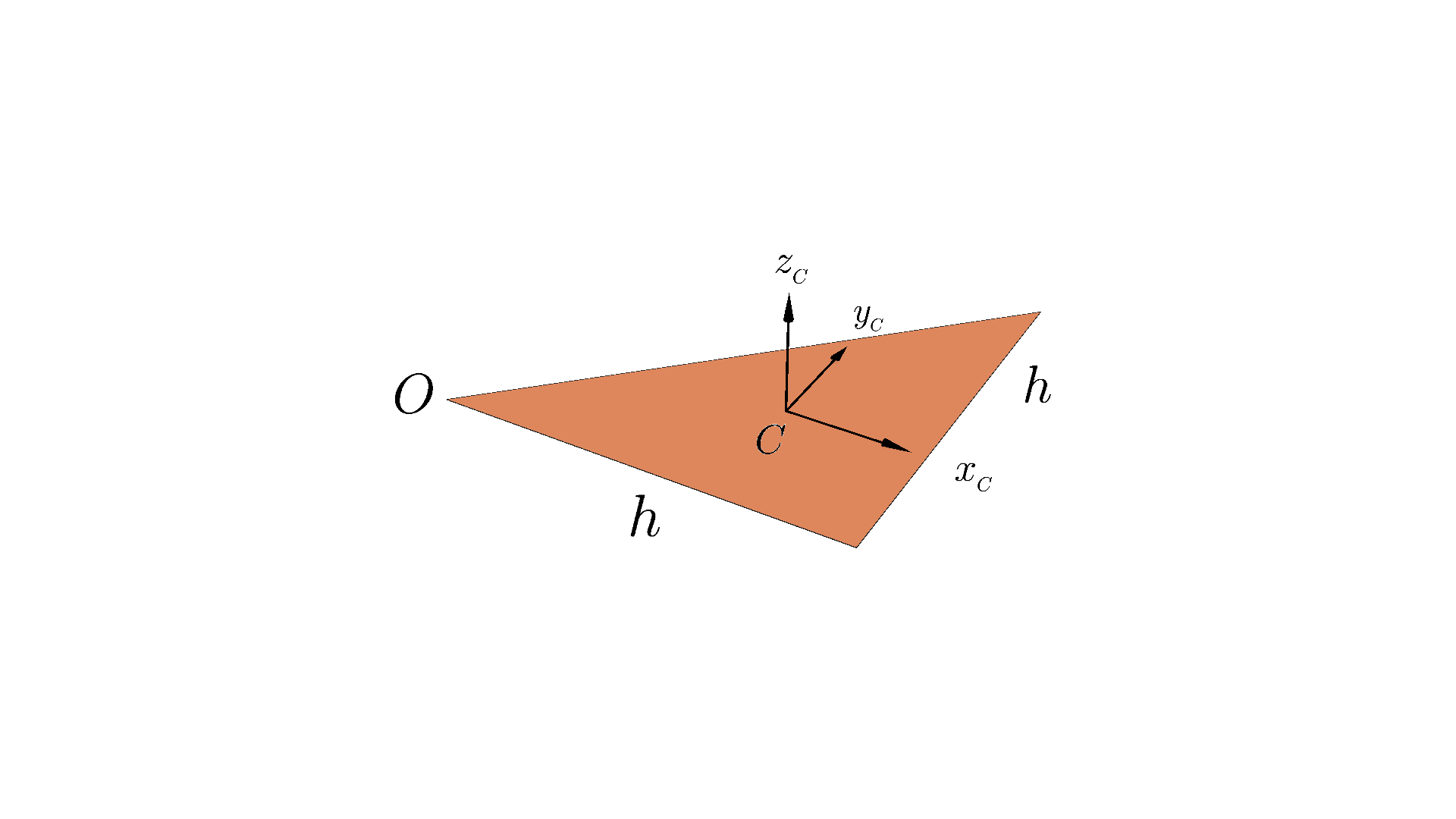
The mass moment of inertia tensor with respect the origin is:
\mathbf{I} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\ I_{xz} & I_{yz} & I_{zz} \end{bmatrix} = \frac{mh^2}{18} \begin{bmatrix} 3 & -2 & 0 \\ -2 & 9 & 0 \\ 0 & 0 & 12 \end{bmatrix}
The mass moment of inertia tensor with respect the center of mass is:
\mathbf{I} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\ I_{xz} & I_{yz} & I_{zz} \end{bmatrix} = \frac{mh^2}{36} \begin{bmatrix} 2 & -1 & 0 \\ -1 & 2 & 0 \\ 0 & 0 & 4 \end{bmatrix}
Let’s compute quantities that will be useful in the computation later. The area of the triangle is A = \frac{h^2}{2}, the mass m = \rho\,A= \rho \frac{h^2}{2}.
For a continuous figure with area A and density \rho(\mathbf{r}), the centroid is given by:
\mathbf{C} = \frac{1}{m} \int_A \rho(\mathbf{r}) \mathbf{r} \mathrm dA
where m=\int_A \rho(\mathbf{r}) \mathrm dA is the total mass. In the case of uniform density, like the current example, \rho(\mathbf{r})=\rho_0 the equation becomes:
\mathbf{C} = \frac{1}{A} \int_A \mathbf{r} \mathrm dA
For the x direction the location of the centroid is (y = f(x) = x):
\begin{aligned} x_c & = \frac{2}{h^2}\int_0^h \int_0^{f(x)} x \mathrm dx\,\mathrm dy \\ & = \frac{2}{h^2}\int_0^h x \left(\int_0^{f(x)} \mathrm dy\right)\mathrm dx \\ & = \frac{2}{h^2}\int_0^h x \left( y \bigg|_0^{f(x)} \right)\mathrm dx \\ & = \frac{2}{h^2}\int_0^h x \cdot x \mathrm dx \\ & = \frac{2}{h^2}\int_0^h x^2 \mathrm dx \\ & = \frac{2}{h^2} \frac{x^3}{3}\bigg|_0^h \\ & = \frac{2}{h^2} \frac{h^3}{3}\bigg|_0^h \\ & = \frac{2}{3}h \end{aligned}
For the y direction the location of the centroid is:
\begin{aligned} y_c & = \frac{2}{h^2}\int_0^h \int_0^{f(x)} y \mathrm dx\,\mathrm dy \\ & = \frac{2}{h^2}\int_0^h \left(\int_0^{f(x)} y \mathrm dy\right)\mathrm dx \\ & = \frac{2}{h^2}\int_0^h \left( \frac{y^2}{3} \bigg|_0^{f(x)} \right)\mathrm dx \\ & = \frac{2}{h^2}\int_0^h \frac{x^2}{3} \mathrm dx \\ & = \frac{2}{h^2} \frac{x^3}{6}\bigg|_0^h \\ & = \frac{2}{h^2} \frac{h^3}{6}\bigg|_0^h \\ & = \frac{1}{3}h \end{aligned}
So the location of the centroid (which is also the center of mass) is:
(x_c, y_c) = \left( \frac{2}{3}h, \frac{1}{3}h\right)
I_{xx}
I_{xx} = \iint_A y^2 \rho \, \mathrm{d}A
It is easier to compute the moment of inertia I_{xx}^0 with respect to the x-axis passing through the origin is:
\begin{aligned} I_{xx}^0 & = \iint_R y^2 \, \rho \, \mathrm{d}A = \rho \int_{0}^{h} \int_{0}^{x} y^2 \, \mathrm{d}y \, \mathrm{d}x \\ & = \rho \int_{0}^{h} \frac{x^3}{3} \, \mathrm{d}x = \rho \frac{h^4}{12} \\ & = \frac{2m}{h^2} \frac{h^4}{12} = \frac{mh^2}{6} \end{aligned}
Using the parallel axis theorem I_{xx}^0 = I_{xx} + m \bar{y}^2, the moment of inertia I_{xx} with respect to the center of mass is
\begin{aligned} I_{xx} & = I_{xx}^0 - m \bar{y}^2 = \frac{mh^2}{6} - m \left(\frac{h}{3}\right)^2 \\ & = \frac{mh^2}{6} - \frac{mh^2}{9} = mh^2 \left(\frac{1}{6} - \frac{1}{9}\right) \\ & = mh^2 \left(\frac{3-2}{18}\right) = \frac{mh^2}{18} \end{aligned}
I_{yy}
I_{xx} = \iint_A x^2 \rho \, \mathrm{d}A
It is easier to compute the moment of inertia I_{yy}^0 with respect to the y-axis passing through the origin is:
\begin{aligned} I_{yy}^0 & = \iint_R x^2 \, \rho \, \mathrm{d}A = \rho \int_{0}^{h} \int_{0}^{x} x^2 \, \mathrm{d}y \, \mathrm{d}x \\ & = \rho \int_{0}^{h} x^2 [y]_{0}^{x} \, \mathrm{d}x = \rho \int_{0}^{h} x^3 \, \mathrm{d}x \\ & = \rho \frac{x^4}{4}\bigg|_{0}^{h} = \rho \frac{h^4}{4} \end{aligned}
Substituting \rho = \frac{2m}{h^2}, we get:
I_{yy}^0 = \frac{2m}{h^2} \frac{h^4}{4} = \frac{mh^2}{2}
Using the parallel axis theorem I_{yy}^0 = I_{yy} + m \bar{x}^2, the moment of inertia I_{yy} with respect to the center of mass is
\begin{aligned} I_{yy} & = I_{yy}^0 - m \bar{x}^2 = \frac{mh^2}{2} - m \left(\frac{2h}{3}\right)^2 \\ & = \frac{mh^2}{2} - m \frac{4h^2}{9} = mh^2 \left(\frac{1}{2} - \frac{4}{9}\right) \\ & = mh^2 \left(\frac{9-8}{18}\right) = \frac{mh^2}{18} \end{aligned}
I_{zz}
I_{xx} = \iint_A (x^2 + y^2) \rho \, \mathrm{d}A
It is easier to compute the moment of inertia I_{zz}^0 with respect to the z-axis passing through the origin is
I_{zz}^0 = \iint_R (x^2 + y^2) \, \rho \, \mathrm{d}A = I_{xx}^0 + I_{yy}^0
We have already computed I_{xx}^0 = \frac{mh^2}{6} and I_{yy}^0 = \frac{mh^2}{2}.
\begin{aligned} I_{zz}^0 & = I_{xx}^0 + I_{yy}^0 = \frac{mh^2}{6} + \frac{mh^2}{2} \\ & = mh^2 \left(\frac{1}{6} + \frac{1}{2}\right) = mh^2 \left(\frac{1+3}{6}\right) \\ & = \frac{4mh^2}{6} = \frac{2mh^2}{3} \end{aligned}
Using the parallel axis theorem I_{zz}^0 = I_{zz} + m (\bar{x}^2 + \bar{y}^2), the moment of inertia I_{zz} with respect to the center of mass is:
\begin{aligned} I_{zz} & = I_{zz}^0 - m (\bar{x}^2 + \bar{y}^2) = \frac{2mh^2}{3} - m \left(\left(\frac{2h}{3}\right)^2 + \left(\frac{h}{3}\right)^2\right) \\ & = \frac{2mh^2}{3} - m \left(\frac{4h^2}{9} + \frac{h^2}{9}\right) = \frac{2mh^2}{3} - m \frac{5h^2}{9} \\ & = mh^2 \left(\frac{2}{3} - \frac{5}{9}\right) = mh^2 \left(\frac{6-5}{9}\right) = \frac{mh^2}{9} \end{aligned}
I_{xy}
I_{xy} = -\iint_A (xy) \rho \, \mathrm{d}A
It is easier to compute the product of inertia with respect to the origin:
\begin{aligned} I_{xy}^0 & = -\iint_R xy \, \rho \, \mathrm{d}A \\ & = -\rho \int_{0}^{h} \int_{0}^{x} xy \, \mathrm{d}y \, \mathrm{d}x \end{aligned}
First, integrate with respect to y:
\int_{0}^{x} xy \, \mathrm{d}y = x \frac{y^2}{2} \bigg|_{0}^{x} = \frac{x^3}{2}
Now, integrate with respect to x:
\begin{aligned} I_{xy}^0 & = -\rho \int_{0}^{h} \frac{x^3}{2} \, \mathrm{d}x \\ & = -\frac{\rho}{2} \frac{x^4}{4} \bigg|_{0}^{h} = -\frac{\rho h^4}{8} \end{aligned}
Substituting \rho = \frac{2m}{h^2}:
I_{xy}^0 = -\frac{2m}{h^2} \frac{h^4}{8} = -\frac{mh^2}{4}
Using the parallel axis theorem I_{xy} = I_{xy}^0 + m \bar{x} \bar{y}:
\begin{aligned} I_{xy} & = -\frac{mh^2}{4} + m \left(\frac{2h}{3}\right) \left(\frac{h}{3}\right) \\ & = -\frac{mh^2}{4} + \frac{2mh^2}{9} = mh^2 \left( -\frac{1}{4} + \frac{2}{9} \right) \\ & = mh^2 \left( \frac{-9 + 8}{36} \right) = -\frac{mh^2}{36} \end{aligned}
I_{yx}
Since the inertia tensor is symmetric,I_{yx} = I_{xy}:
I_{yx} = -\frac{mh^2}{36}
I_{xz}
I_{xx} = -\iint_A xz \rho \, \mathrm{d}A
Since the triangle lies in the xy plane, z=0 and therefore all the products of inertia with respect to z are zero:
I_{xz} = I_{yz} = I_{zx} = I_{zy} = 0
Three dimensional shapes
Cuboid
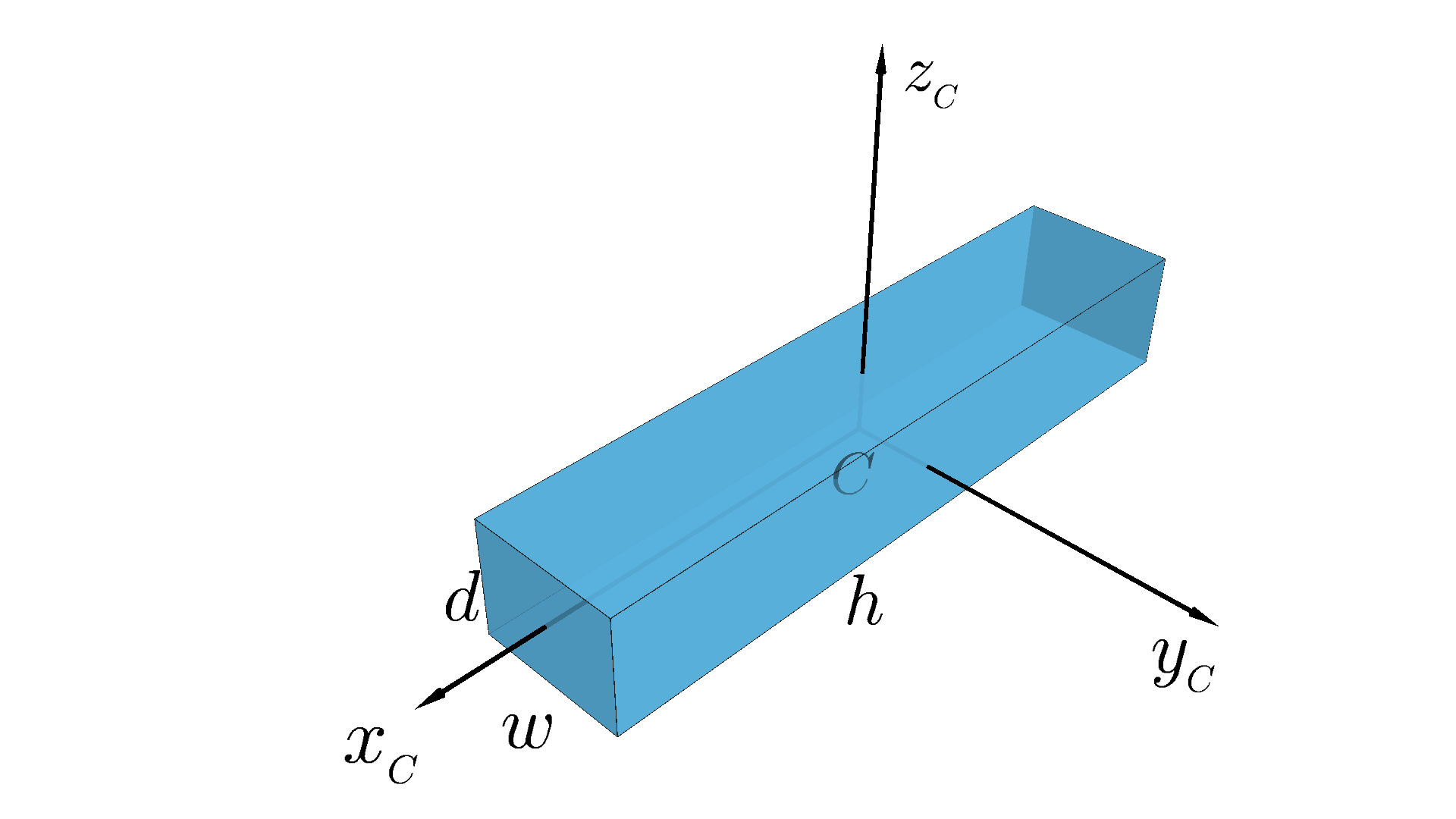
The mass moment of inertia tensor is:
\mathbf{I} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\ I_{xz} & I_{yz} & I_{zz} \end{bmatrix} = \frac{m}{12}\begin{bmatrix} w^2 + d^2 & 0 & 0 \\ 0 & d^2 + h^2 & 0 \\ 0 & 0 & w^2 + h^2 \end{bmatrix}
The mass m is distributed uniformly, so the density is:
\rho = \frac{m}{V} =\frac{m}{h \cdot w \cdot d}
I_{xx}
I_{xx} = \rho \int_{-h/2}^{h/2} \int_{-d/2}^{d/2} \int_{-w/2}^{w/2} (y^2 + z^2) \, \mathrm dx \, \mathrm dy \, \mathrm dz
Since y^2 + z^2 does not depend on x, the x-integral evaluates to the height of the cuboid (h):
\begin{aligned} I_{xx} & = \rho \cdot h \int_{-d/2}^{d/2} \int_{-w/2}^{w/2} (y^2 + z^2) \, \mathrm dy \, \mathrm dz \\ & = \rho \cdot h \left[ \int_{-d/2}^{d/2} y^2 \, \mathrm dy \int_{-w/2}^{w/2} dz + \int_{-w/2}^{w/2} z^2 \, \mathrm dz \int_{-d/2}^{d/2} dy \right] \\ & = \rho \cdot h \left\{\left[ \frac{y^3}{3} \right]_{-d/2}^{d/2} \bigg[ z \bigg]_{-w/2}^{w/2} + \left[ \frac{z^3}{3} \right]_{-w/2}^{w/2} \bigg[ y \bigg]_{-d/2}^{d/2} \right\} \\ & = \rho \cdot h \left\{\frac{1}{3} \left[\left(\frac{d}{2}\right)^3 - \left(-\frac{d}{2}\right)^3\right] \, w + \frac{1}{3} \left[\left(\frac{w}{2}\right)^3 - \left(-\frac{w}{2}\right)^3\right] \, d \right\} \\ & = \rho \cdot h \left(\frac{d^3}{12}w + \frac{w^3}{12}d \right) \\ & = \rho \cdot (h \, d\, w) \left( \frac{d^2 + w^2}{12}\right) \\ & = m \left( \frac{d^2 + w^2}{12}\right) \end{aligned}
I_{yy}
I_{yy} = \rho \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} \int_{-d/2}^{d/2} (x^2 + z^2) \, \mathrm dx \, \mathrm dy \, \mathrm dz
Since x^2 + z^2 does not depend on y, the y-integral evaluates to the width of the cuboid (w):
\begin{aligned} I_{yy} & = \rho \cdot w \int_{-h/2}^{h/2} \int_{-d/2}^{d/2} (x^2 + z^2) \, \mathrm dx \, \mathrm dz \\ & = \rho \cdot w \left[ \int_{-h/2}^{h/2} x^2 \, \mathrm dx \int_{-d/2}^{d/2} dz + \int_{-d/2}^{d/2} z^2 \, \mathrm dz \int_{-h/2}^{h/2} dx \right] \\ & = \rho \cdot w \left\{\left[ \frac{x^3}{3} \right]_{-h/2}^{h/2} \bigg[ z \bigg]_{-d/2}^{d/2} + \left[ \frac{z^3}{3} \right]_{-d/2}^{d/2} \bigg[ x \bigg]_{-h/2}^{h/2} \right\} \\ & = \rho \cdot w \left\{\frac{1}{3} \left[\left(\frac{h}{2}\right)^3 - \left(-\frac{h}{2}\right)^3\right] \, d + \frac{1}{3} \left[\left(\frac{d}{2}\right)^3 - \left(-\frac{d}{2}\right)^3\right] \, h \right\} \\ & = \rho \cdot w \left(\frac{h^3}{12}d + \frac{d^3}{12}h \right) \\ & = \rho \cdot (h \, w\, d) \left( \frac{h^2 + d^2}{12}\right) \\ & = m \left( \frac{h^2 + d^2}{12}\right) \end{aligned}
I_{zz}
I_{zz} = \rho \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} \int_{-d/2}^{d/2} (x^2 + y^2) \, \mathrm dx \, \mathrm dy \, \mathrm dz
Since x^2 + y^2 does not depend on z, the z-integral evaluates to the depth of the cuboid (d):
\begin{aligned} I_{zz} & = \rho \cdot d \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} (x^2 + y^2) \, \mathrm dx \, \mathrm dy \\ & = \rho \cdot d \left[ \int_{-h/2}^{h/2} x^2 \, \mathrm dx \int_{-w/2}^{w/2} dy + \int_{-w/2}^{w/2} y^2 \, \mathrm dy \int_{-h/2}^{h/2} dx \right] \\ & = \rho \cdot d \left\{\left[ \frac{x^3}{3} \right]_{-h/2}^{h/2} \bigg[ y \bigg]_{-w/2}^{w/2} + \left[ \frac{y^3}{3} \right]_{-w/2}^{w/2} \bigg[ x \bigg]_{-h/2}^{h/2} \right\} \\ & = \rho \cdot d \left\{\frac{1}{3} \left[\left(\frac{h}{2}\right)^3 - \left(-\frac{h}{2}\right)^3\right] \, w + \frac{1}{3} \left[\left(\frac{w}{2}\right)^3 - \left(-\frac{w}{2}\right)^3\right] \, h \right\} \\ & = \rho \cdot d \left(\frac{h^3}{12}w + \frac{w^3}{12}h \right) \\ & = \rho \cdot (h \, w\, d) \left( \frac{h^2 + w^2}{12}\right) \\ & = m \left( \frac{h^2 + w^2}{12}\right) \end{aligned}
I_{xy}
I_{xy} = \rho \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} \int_{-d/2}^{d/2} (x y) \, \mathrm dx \, \mathrm dy \, \mathrm dz
Since x y does not depend on z, the z-integral evaluates to the depth of the cuboid (d):
\begin{aligned} I_{xy} & = \rho \cdot d \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} (x y) \, \mathrm dx \, \mathrm dy \\ & = \rho \cdot d \left[ \int_{-h/2}^{h/2} x \, \mathrm dx \int_{-w/2}^{w/2} y \, \mathrm dy \right] \\ & = \rho \cdot d \left\{\left[ \frac{x^2}{2} \right]_{-h/2}^{h/2} \cdot \left[ \frac{y^2}{2} \right]_{-w/2}^{w/2} \right\} \\ & = \rho \cdot d \left\{\frac{1}{4} \left[\left(\frac{h}{2}\right)^2 - \left(-\frac{h}{2}\right)^2\right] \cdot \frac{1}{4} \left[\left(\frac{w}{2}\right)^2 - \left(-\frac{w}{2}\right)^2\right] \right\} \\ & = \rho \cdot d \cdot 0 \cdot 0 \\ & = 0 \end{aligned}
I_{xz}
I_{xz} = \rho \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} \int_{-d/2}^{d/2} (x z) \, \mathrm dx \, \mathrm dy \, \mathrm dz
Since x z does not depend on y, the y-integral evaluates to the weight of the prism (w):
\begin{aligned} I_{xz} & = \rho \cdot w \int_{-h/2}^{h/2} \int_{-d/2}^{d/2} (x z) \, \mathrm dx \, \mathrm dz \\ & = \rho \cdot w \left[ \int_{-h/2}^{h/2} x \, \mathrm dx \int_{-d/2}^{d/2} z \, \mathrm dz \right] \\ & = \rho \cdot w \left\{\left[ \frac{x^2}{2} \right]_{-h/2}^{h/2} \cdot \left[ \frac{z^2}{2} \right]_{-d/2}^{d/2} \right\} \\ & = \rho \cdot w \left\{\frac{1}{4} \left[\left(\frac{h}{2}\right)^2 - \left(-\frac{h}{2}\right)^2\right] \cdot \frac{1}{4} \left[\left(\frac{d}{2}\right)^2 - \left(-\frac{d}{2}\right)^2\right] \right\} \\ & = \rho \cdot w \cdot 0 \cdot 0 \\ & = 0 \end{aligned}
I_{yz}
I_{yz} = \rho \int_{-h/2}^{h/2} \int_{-w/2}^{w/2} \int_{-d/2}^{d/2} (y z) \, \mathrm dx \, \mathrm dy \, \mathrm dz
Since y z does not depend on x, the x-integral evaluates to the height of the prism (h):
\begin{aligned} I_{yz} & = \rho \cdot h \int_{-w/2}^{w/2} \int_{-d/2}^{d/2} (y z) \, \mathrm dy \, \mathrm dz \\ & = \rho \cdot h \left[ \int_{-w/2}^{w/2} y \, \mathrm dy \int_{-d/2}^{d/2} z \, \mathrm dz \right] \\ & = \rho \cdot h \left\{\left[ \frac{y^2}{2} \right]_{-w/2}^{w/2} \cdot \left[ \frac{z^2}{2} \right]_{-d/2}^{d/2} \right\} \\ & = \rho \cdot h \left\{\frac{1}{4} \left[\left(\frac{w}{2}\right)^2 - \left(-\frac{w}{2}\right)^2\right] \cdot \frac{1}{4} \left[\left(\frac{d}{2}\right)^2 - \left(-\frac{d}{2}\right)^2\right] \right\} \\ & = \rho \cdot h \cdot 0 \cdot 0 \\ & = 0 \end{aligned}
Cylinder
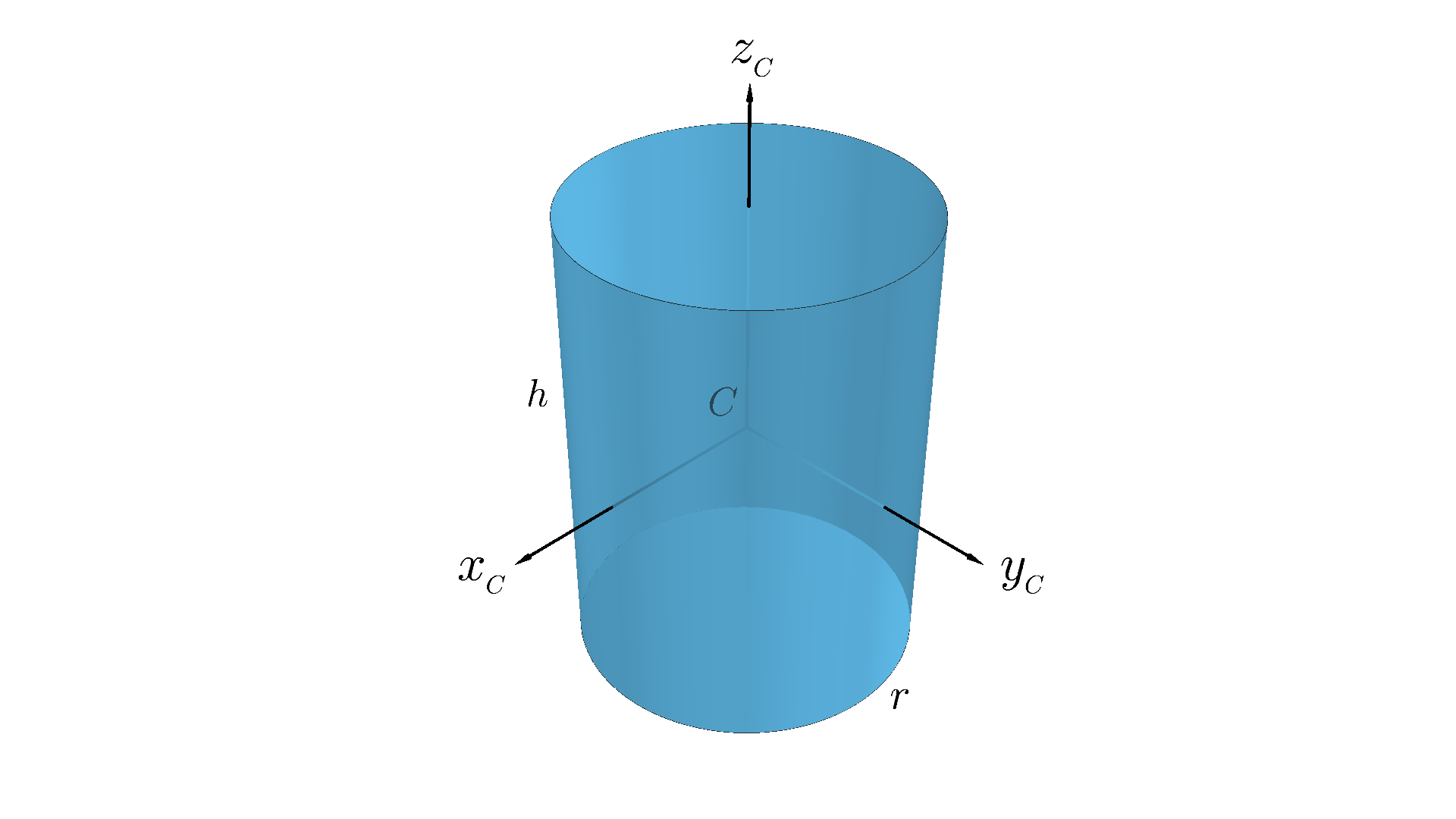
The mass moment of inertia tensor is:
\mathbf{I} = \begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\ I_{xz} & I_{yz} & I_{zz} \end{bmatrix} = \begin{bmatrix} \frac{1}{12}m \left(3r^2 + h^2 \right) & 0 & 0 \\ 0 & \frac{1}{12}m \left(3r^2 + h^2 \right) & 0 \\ 0 & 0 & \frac{1}{2}m r^2 \end{bmatrix}
The mass m is distributed uniformly, so the density is:
\rho = \frac{m}{V} = \frac{m}{\pi r^2 h}
I_{xx}
I_{xx} = \rho \int_{-h/2}^{h/2} \int_{0}^{2\pi} \int_{0}^{r} (y^2 + z^2) \, \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz
We know that y = \rho' \sin\phi, so y^2 = \rho'^2 \sin^2\phi.
I_{xx} = \rho \int_{-h/2}^{h/2} \int_{0}^{2\pi} \int_{0}^{r} (\rho'^3 \sin^2\phi + z^2 \rho') \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz
The integral can be factorized as:
I_{xx} = \rho \left[ \int_{-h/2}^{h/2} \mathrm dz \int_{0}^{2\pi} \sin^2\phi \, \mathrm d\phi \int_{0}^{r} \rho'^3 \, \mathrm d\rho' + \int_{-h/2}^{h/2} z^2 \, \mathrm dz \int_{0}^{2\pi} \mathrm d\phi \int_{0}^{r} \rho' \, \mathrm d\rho' \right]
Computing the various contributions:
\begin{aligned} & \int_{0}^{r} \rho'^3 \, \mathrm d\rho' = \frac{r^4}{4} \\ & \int_{0}^{2\pi} \sin^2\phi \, \mathrm d\phi = \pi \\ & \int_{-h/2}^{h/2} \mathrm dz = h \\ & \int_{-h/2}^{h/2} z^2 \, \mathrm dz = \frac{h^3}{12} \\ & \int_{0}^{2\pi} \mathrm d\phi = 2\pi \\ & \int_{0}^{r} \rho' \, \mathrm d\rho' = \frac{r^2}{2} \end{aligned}
Substituting:
\begin{aligned} I_{xx} & = \rho \left( h \cdot \pi \cdot \frac{r^4}{4} + \frac{h^3}{12} \cdot 2\pi \cdot \frac{r^2}{2} \right) = \rho \left( \frac{\pi h r^4}{4} + \frac{\pi h^3 r^2}{12} \right) \\ & = \frac{m}{\pi r^2 h} \left( \frac{\pi h r^4}{4} + \frac{\pi h^3 r^2}{12} \right) = \frac{1}{12}m \left( 3r^2 + h^2 \right) \end{aligned}
I_{yy}
Due to the symmetry of the cylinder about the z-axis (which is the axis of the cylinder), I_{yy} is the same as I_{xx}. The calculation would be analogous, just replacing y^2 with x^2 in the integrand, and due to the cylindrical symmetry in the xy plane, the result is identical. Therefore, it is unnecessary to compute I_{yy} explicitly:
I_{yy} = I_{xx} = \frac{1}{12}m \left( 3r^2 + h^2 \right)
I_{zz}
I_{zz} = \rho \int_V (x^2 + y^2) \, \mathrm dV
In cylindrical coordinates, x^2 + y^2 = \rho'^2 and \mathrm dV = \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz.
The integral becomes:
I_{zz} = \rho \int_{-h/2}^{h/2} \int_{0}^{2\pi} \int_{0}^{r} (\rho'^2) \, \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz
The integral can be factorized as:
I_{zz} = \rho \int_{-h/2}^{h/2} \mathrm dz \int_{0}^{2\pi} \mathrm d\phi \int_{0}^{r} \rho'^3 \, \mathrm d\rho'
Computing the various contributions:
\begin{aligned} & \int_{-h/2}^{h/2} \mathrm dz = h \\ & \int_{0}^{2\pi} \mathrm d\phi = 2\pi \\ & \int_{0}^{r} \rho'^3 \, \mathrm d\rho' = \left[ \frac{\rho'^4}{4} \right]_{0}^{r} = \frac{r^4}{4} \end{aligned}
Substituting:
\begin{aligned} I_{zz} & = \rho \cdot h \cdot 2\pi \cdot \frac{r^4}{4} = \rho \frac{\pi h r^4}{2}\\ & = \frac{m}{\pi r^2 h} \frac{\pi h r^4}{2} = \frac{m r^2}{2} \end{aligned}
I_{xy}
I_{xy} = - \rho \int_V x y \, \mathrm dV
In cylindrical coordinates, x = \rho' \cos\phi, y = \rho' \sin\phi, \mathrm dV = \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz.
I_{xy} = - \rho \int_{-h/2}^{h/2} \int_{0}^{2\pi} \int_{0}^{r} (\rho' \cos\phi) (\rho' \sin\phi) \, \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz
The integral can be factorized as:
I_{xy} = - \rho \int_{-h/2}^{h/2} \mathrm dz \int_{0}^{2\pi} \cos\phi \sin\phi \, \mathrm d\phi \int_{0}^{r} \rho'^3 \, \mathrm d\rho'
Computing the middle integral:
\begin{aligned} \int_{0}^{2\pi} \cos\phi \sin\phi \, \mathrm d\phi & = \frac{1}{2} \int_{0}^{2\pi} \sin(2\phi) \, \mathrm d\phi \\ & = \frac{1}{2} \left[ -\frac{1}{2} \cos(2\phi) \right]_{0}^{2\pi} \\ & = -\frac{1}{4} (\cos(4\pi) - \cos(0)) = 0 \end{aligned}
As one of the integral is null, the product is null and therefore:
I_{xy} = 0
I_{xz}
I_{xz} = - \rho \int_V x z \, \mathrm dV
In cylindrical coordinates, x = \rho' \cos\phi, z = z, and \mathrm dV = \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz.
I_{xz} = - \rho \int_{-h/2}^{h/2} \int_{0}^{2\pi} \int_{0}^{r} (\rho' \cos\phi) z \, \rho' \, \mathrm d\rho' \, \mathrm d\phi \, \mathrm dz
The integral can be factorized as:
I_{xz} = - \rho \left( \int_{-h/2}^{h/2} z \, \mathrm dz \right) \left( \int_{0}^{2\pi} \cos\phi \, \mathrm d\phi \right) \left( \int_{0}^{r} \rho'^2 \, \mathrm d\rho' \right)
Computing the first integral:
\begin{aligned} \int_{-h/2}^{h/2} z \, \mathrm dz & = \left[ \frac{z^2}{2} \right]_{-h/2}^{h/2} = \frac{1}{2} \left( \left(\frac{h}{2}\right)^2 - \left(-\frac{h}{2}\right)^2 \right) \\ & = \frac{1}{2} \left( \frac{h^2}{4} - \frac{h^2}{4} \right) = 0 \end{aligned}
As one of the integral is null, the product is null and therefore:
I_{xz} = 0
I_{yz}
Due to the symmetry of the cylinder about the z-axis (which is the axis of the cylinder), I_{yz} is the same as I_{xz}:
I_{yz} = I_{xz} = 0